Scara-Roboter Epson E2-Serie
|
| Produktfamilien-Verschlagwortung |
|---|
| |
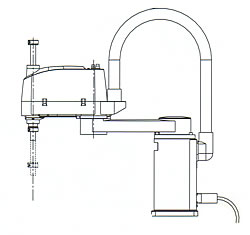
| Funktionsprinzip |
| Horizontal-Knickarm-Roboter, Scara-Roboter (Selective Compliance Assembly Robot Arm) genannt, sind aus einem Roboterarm aus zwei Gliedern ähnlich dem eines menschlichen Armes aufgebaut. Durch zwei vertikale Drehachsen an der "Schulter" und dem "Ellenbogen" sind die Glieder in horizontaler Ebene beweglich miteinander verbunden. Über eine Linearachse am Ende der 2.ten Achse wird der Greifer bzw. das Werkzeug in Z-Richtung bewegt. Mit der vierten Achse einer vertikalen Drehachse wird die Z-Achsenpinole um ihre Mittelachse gedreht und so der Greifer bzw. das Werkzeug orientiert. |