Roboter-Positionsregelung VMT RP
|
| Produktfamilien-Verschlagwortung |
|---|
| |
| Funktionsprinzip |
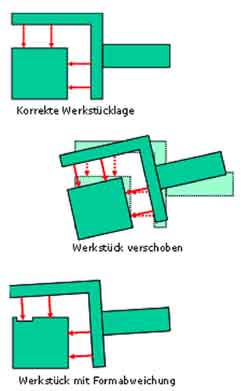
| Die Messsensorik besteht aus bis zu 8 Lasertriangulationssensoren, die durch Laserdistanzsensoren und 2D-Kameras ergänzt werden können, die fest am Greifer des Roboterarmes montiert sind. Nach dem Triangulationsprinzip werden mit den Lasersensoren alle relevanten Punkte des Werkstücks aus mehreren Richtungen permanent vermessen und die Messergebnisse an den Auswerte-PC übertragen. Durch den Vergleich der Messergebnisse mit den Sollwerten werden die Korrekturwerte errechnet und über eine Ethernet-Schnittstelle mit Hilfe des RCTI-Protokolls mit einer Frequenz von 12 ms an die Roboter-Steuerung übertragen. Die Messgenauigkeit der Sensorik übertrifft die Wiederholgenauigkeit des Roboters und erlaubt so die hochpräzise Regelung von bis zu sechs Freiheitsgraden. Bei Formabweichungen des Werkstücks wird die bestmögliche Relativlage des Roboters errechnet. Durch eine redundante Anordnung der Sensoren kann der Roboter auch bei Ausfall eines Sensors weiter eingesetzt werden. |