Roboter-Bahnkorrektur VMT BK
|
| Produktfamilien-Verschlagwortung |
|---|
| |
| Funktionsprinzip |
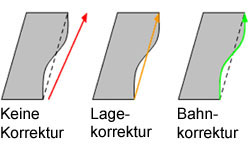
| Die Messsensorik und die Bearbeitungswerkzeuge sind gemeinsam auf einer drehbaren Achse am Roboterarm montiert. Die Messsensorik ist zum Werkstück hingeschwenkt und wird in einem ersten Durchgang entlang der mit dem Referenzwerkstück eingelernten Soll-Bahn geführt. Mit Hilfe der Lasersensoren werden nach dem Triangulationsprinzip alle gewünschten Punkte des Werkstücks vermessen. Die Messwerte werden an den Steuer-PC übertragen, mit den Sollwerten verglichen und für den anschließenden Bearbeitungsgang als Korrekturwerte im Zellen- oder Fahrzeugkoordinatensystem an die Robotersteuerung ausgegeben. Die Messgenauigkeit liegt über der Wiederholgenauigkeit des Roboters und erlaubt so die bestmögliche Korrektur. Der Roboterarm fährt nach Ende der Messfahrt in die Ausgangsposition zurück. Die Bearbeitungswerkzeuge werden in Arbeitsstellung gedreht und damit gleichzeitig die Messsensorik weggeschwenkt. Nun beginnt der eigentliche Bearbeitungsgang mit den korrigierten, optimal auf das Werkstück angepassten Roboter-Bahndaten. |