Modulares Palettiersystem PS 10
|
| Produktfamilien-Verschlagwortung |
|---|
| |
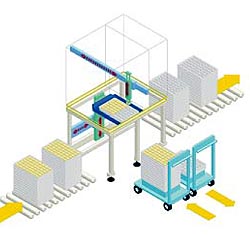
| Funktionsprinzip |
| Das automatische Palettiersystem lässt sich abhängig von der Arbeitsrichtung zum Entladen und geordneten Bereitstellen von Bauteilen aus gestapelten Trays nutzen oder in umgekehrter Richtung zum Beladen und Verpacken in Trays sowie zum Stapeln der Trays. Beim Einsatz zur geordneten Bereitstellung wird ein Stapel beladener Trays mit einem Wagen oder Rollenförderer dem linken Schacht der Tray-Handhabung zugeführt. Mit rein pneumatischen Handhabungsachsen werden Tray-Wechselzeiten von ca. 15 s erreicht. Das oberste Tray wird von einem Greifer auf einer pneumatisch angetriebenen Achse angehoben und in der Entladeposition gestoppt. In diesem Fall erfolgt die Werkstückentnahme durch ein dreiachsiges kartesisches Handhabungssystem mit XYZ-Achsen oder mit Roboter. Beim Einsatz von servoelektrischen Tray-Handhabungsachsen sind kurze Wechselzeiten bis zu ca. 6 s und frei programmierbare Bewegungen möglich. Die servoelektrisch angetriebene horizontale Achse verfährt den Tray in die frei programmierbare Übergabeposition. Hierbei werden die Bauteile von einem YZ-Linienportal mit bauteilspezifischen Einfach- oder Mehrfachgreifer nach einem vorprogrammierten Schema aufgenommen, in die Bereitstellungsposition verfahren und dort abgesetzt. Das seitliche Verfahren des Traytisches bildet die Bewegung in der Y-Achse. Bei sehr hohen Anforderungen und Flexibilität und Dynamik und für Zykluszeiten unter 3 s kann auch ein Roboter zur Entladung der Trays eingesetzt werden. Wenn die Entladung beendet ist, wird der leere Tray über den rechten Schacht gefahren und dort auf den zweiten Stapel abgesenkt. |