Mehrzweck-Bildverarbeitungssysteme InSight 3400
|
| Produktfamilien-Verschlagwortung |
|---|
| |
| Funktionsprinzip |
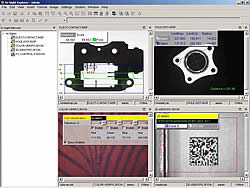
| Die in der Auswerteeinheit integrierte Bildauswertung und Steuerung ermöglicht zusammen mit der Kamera eine Stand-alone Anwendung. Zur Programmierung wird das Konfigurationsprogramm über das Handbediengerät aufgerufen. Durch aktive Hilfefunktionen unterstützt, generiert der Anwender in einer Tabelle die notwendige Befehlsabfolge. Parallel kann man am Bildschirm das von der Kamera aufgenommene Bild sehen und so die Einstellungen von z.B. Kontrastverhältnissen optimieren. Der erste Schritt ist die Bildaufnahme des beleuchteten Objekts durch die Kamera. Dieses Bild wird anschließend durch einen Framegrabber erfasst und in digitalisierter Form dem PC-Rechner zur Auswertung übergeben. Im nächsten Schritt wird durch Vorverarbeitungsalgorithmen die Unterscheidbarkeit von zu erkennenden Merkmalen und dem Hintergrund verbessert. Zu den hier angewendeten Maßnahmen zählen u.a. Filteralgorithmen, eine automatische Helligkeitsanpassung und die Shadingkorrektur. Durch Erosions- und Dilatationsfunktionen werden z.B. kleine Bildstörungen unterdrückt bzw. überbrückt. Bei der Helligkeitsanpassung wird die Grundhelligkeit des Bildes aufgrund variierender Lichtverhältnisse durch wechselnde Sonneneinstrahlung oder variierende Oberflächenbeschaffenheit korrigiert. Durch die Shadingkorrektur werden Helligkeitsverläufe im Bild durch eine ungleichmäßige Beleuchtung korrigiert, so dass der Bildhintergrund mit einer konstanten Helligkeit erscheint. Auf diesem für die weitere Auswertung vorbereiteten Bild gilt es nun, das relevante Objekt zu isolieren und zu erkennen: Hierzu wird der Grauwertverlaufes innerhalb des Bildes untersucht. Verändert sich der Grauwert sprunghaft deutet dies auf eine Objektkante hin. In der Auswertung dieser Linienverläufe wird die Kontur des Bauteiles ermittelt, unabhängig ob dies eine vollständige Kontur mit einem geschlossenen Linienzug ergibt oder ob es ein Konturabschnitt ist. Dadurch können auch Bauteile erkannt werden, desen Kontur durch ein überlappendes anderes Bauteil unterbrochen wird. Dieser Linienzug wird vektoriell erfasst und damit die jeweilige Bildaufnahme auf Abweichungen bzw. Einhaltung der Toleranzen geprüft. Somit lassen sich z.B. der Lotabstand zweier Geraden und deren Winkel zueinander exakt bestimmen. Durch die vektorielle Darstellung ist die Auswertung unabhängig von der Drehlage des Objekts und deren Entfernung zur Kamera. |