Sechsachs-Vertikal-Knickarmroboter ARV
|
| Produktfamilien-Verschlagwortung |
|---|
| |
| Funktionsprinzip |
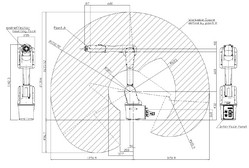
| Sechsachs-Vertikal-Knickarmroboter verfügen über serielle Kinematiken, deren Gelenkarme an einander anschließen. Dieser Aufbau erhöht Beweglichkeit und Flexibilität im Vergleich zu anderen Kinematiken, allerdings bei geringerer Traglast. Die Roboter der ARV-Serie bewegen modellabhängig maximal 6 kg. Die neuen ARV-6-Achsenroboter arbeiten mit der für Hirata einheitlichen Bediensoftware. Ihre Installation wird durch Offline-Teaching mit Assistenzfunktionen und Simulationstools z.B. zur Kollisionsvermeidung unterstützt. Mit nur einem Controller können mehrere Robotersysteme angesteuert werden. Die Grundstruktur der Roboter gewährleistet eine hohe Steifigkeit, das sorgt auch bei hohen Geschwindigkeiten für geringe Vibrationen und damit für eine schnelle und genaue Positionierung sowie eine Reduzierung der Zykluszeiten. |