| Integrationslevel |
|---|
| Lösung |
| Kostenklasse |
|---|
| 30,000 - 50,000 EUR |
|
| Anbieter und Produkt |
|---|
| Anbieter: |  VMT Vision Machine Technic Bildverarbeitungssysteme GmbH VMT Vision Machine Technic Bildverarbeitungssysteme GmbH |
| Produktfamilie: | Roboter-Bahnkorrektur VMT BK
| | Produktvarianten-Verschlagwortung |
|---|
| Bildverarbeitung Komplettlösungen der Bildverarbeitung zur Qualitätskontrolle, Prozesskontrolle, Positionsbestimmung Positionsbestimmung mit Bildverarbeitung, Komplettlösungen Lasersensor-Lösungen zur Roboter-Bahnkorrektur |
| Produktbeschreibung |
|---|
| Einsatzbereich |
|---|
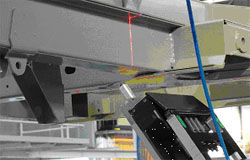
Die Roboter-Bahnkorrektur VMT BK dient zur individuellen Anpassung der Roboterbahnführung an das Werkstück, um automatisch leichte Lageabweichungen, Verformungen oder Toleranzen zu korrigieren. Vor der Bearbeitung wird das Werkstück in einem ersten Durchgang entlang der Soll-Bahnführung mit Lasertriangulations- oder Laserlichtschnittsensoren, die am Roboterarm befestigt sind, abgefahren. Die Werkstückgeometrie, Nähte, Fugen oder die Bearbeitungspunkte werden mit einer Genauigkeit von <0,1 mm berührungslos vermessen. Mit Hilfe dieser Daten wird die Roboterbahn für den nachfolgenden Arbeitsgang korrigiert, was eine Bearbeitung mit maximaler Genauigkeit ermöglicht.
Zur Kommunikation mit der Anlage sind eine serielle Schnittstelle, Schnittstellen Interbus und Profibus und digitale Ein- und Ausgänge vorhanden. Weitere Schnittstellen werden auf Anfrage geliefert. Typische Anwendungen sind z. B. Schweiß- und Lötaufgaben, Nahtabdichtungen sowie die Kantenbearbeitung. |
| Produktmerkmale |
|---|
- Betriebsfähige Bahnkorrektur-Lösung zur Roboterbearbeitung von Werkstücken mit leichten Lageabweichungen, Verformungen und Toleranzen mit PC-basierter Spezialsoftware und kundenspezifischer Messsensorik
- Messgenauigkeit: <0,1 mm
- Taktzeiten (typisch): 30-60 s
- Für KUKA-Roboter, andere Hersteller auf Anfrage
- Serielle Schnittstelle
- Digitale Ein- und Ausgänge
- Schnittstellen: Interbus, Profibus, andere auf Anfrage |
|