| Anbieter und Produkt |
|---|
| Anbieter: |  VMT Vision Machine Technic Bildverarbeitungssysteme GmbH VMT Vision Machine Technic Bildverarbeitungssysteme GmbH |
| Produktfamilie: | Bildverarbeitungs-Lösungen VMT 2D |
| Produktvariante: | Bildverarbeitungs-Lösungen VMT 2D |
| Applikationsbeispiel-Verschlagwortung |
|---|
| Anwendung: | Objekterkennung und Positionsbestimmung Objekt-Positionsbestimmung 2D-Positionsbestimmung |
| Erzeugnis: | Metallteile Gussteile |
| Branche: | Fahrzeugbau Automobilindustrie |
| Applikationsbeschreibung |
|---|
| Aufgabenstellung: |
|---|
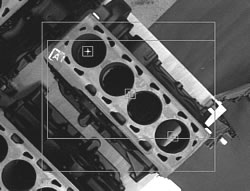
| Für die Motorenfertigung angelieferte Kurbelgehäuse werden teilgeordnet auf Transportpaletten in 5 Stapelebenen mit bis zu 40 mm Positionstoleranz sowie Verdrehungen der einzelnen Bauteile an die Fertigungslinie im Motorenwerk transportiert. Die einzelnen Lagen sind durch Holzböden getrennt. Mit dem Einsatz eines Roboters soll die manuelle Entnahme der Kurbelgehäuse von der Palette und das Aufsetzen auf die Fertigungslinie ersetzt werden. Dabei wird für das automatisierte Greifen der Kurbelgehäuse eine genaue Positionsangabe benötigt. |
| Realisierung: |
|---|
| Mit dem Bildverarbeitungssystem VMT 2D konnte die Positionsbestimmung der Kurbelgehäuse unabhängig von Lage- und Drehinvarianzen realisiert werden. Von einer Handkamera mit Spotbeleuchtung, die am Greiferkopf des Roboters installiert ist, werden die Kurbelgehäuse in der Draufsicht erfasst. Hierzu fährt der Roboter bei einer neu angelieferten Palette die Kamera mit entsprechendem Abstand über die angenommene Position eines Kurbelgehäuse der ersten Lage und nimmt dieses auf. Dabei wird der Bildausschnitt groß genug gewählt, um auch verdrehte und ungenau positionierte Kurbelgehäuse mit der Kamera zu erfassen. Anhand der Merkmale wie Zylinderbohrungen kann anschließend die genaue Position ermittelt werden. Zum Greifen des Bauteils werden die Positionsdaten vom Bildverarbeitungssystem an den Roboter übermittelt. Ist eine Lage vollständig entnommen erkennt dies das System und lokalisiert die Position der Griffmulden an den Holzböden. Anhand dieser Information entnimmt der Roboter die Zwischenböden. |
| Kundennutzen: |
|---|
| Die manuelle Entnahme der nicht exakt ausgerichteten Kurbelgehäuse konnte durch die Positionsbestimmung zuverlässig automatisiert werden. Mit der Flexibilität des Bildverarbeitungssystems kann neben der Positionsbestimmung der Kurbelgehäusen auch die automatische Entnahme der Transportböden realisiert werden. |